"מכונית אוטונומית צריכה לנסוע מיליארדי ק"מ לפני שתגיע לכביש"
כך אמר שי רוטמן, מנהל פיתוח עסקי ב-קוגנטה, שהמשיך: "וויימו, המכונית של גוגל, אובר, וקרוז – המכונית האוטונומית של ג'נרל מוטורס והונדה - עדיין לא נסעו אחוז אחד מהנדרש כדי שמכונית אוטונומית תוכל לנסוע על הכביש ברמת ביטחון של לפחות בן אנוש"








"על מנת לקחת כלי רכב אוטונומי ולאמן אותו ברמה של מכוניות המונהגות על ידי בני אנוש, נדרש שהרכב ייסע את המרחק הבלתי נתפס של 11 מיליארד מיילים, שהם כ-17 מיליארד קילומטרים. וויימו, המכונית של גוגל, אובר, וקרוז – המכונית האוטונומית של ג'נרל מוטורס והונדה – עדיין לא נסעו אחוז אחד מהנדרש כדי שמכונית אוטונומית תוכל לנסוע על הכביש ברמת ביטחון של לפחות בן אנוש", כך אמר שי רוטמן, מנהל פיתוח עסקי, קוגנטה.
קוגנטה, הלחם המילים Cognition ו-Data, הוקמה ב-2016 על ידי דן עצמון, מנכ"ל החברה, מומחה בלמידה עמוקה ו-ADAS (מערכות עזר לנהיגה), ששימש בעבר מנהל ה-ADAS של חברת הרמן שנרכשה על ידי סמסונג. במשרדיה הממוקמים ברחובות מועסקים כיום כ-40 עובדים. החברה גייסה 23.5 מיליון דולרים בשלושה סבבי גיוס, האחרון – בהובלת סקייל ונצ'רס.
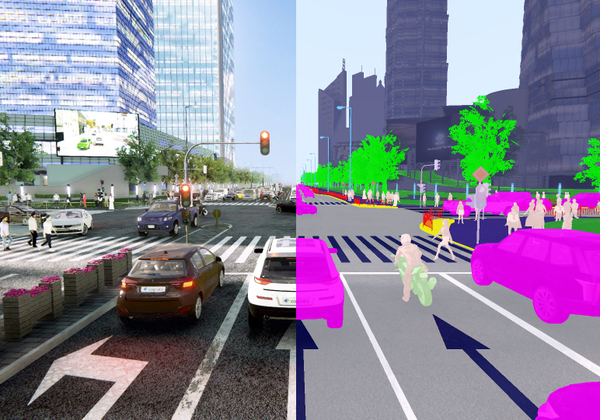
חיבור של שתי הדמיות היוצר יכולת עבודה מיידית על המידע בלא להעבירו טיוב על ידי בני אנוש. שקף: קוגנטה
מערכת הדמיה – מסייעת לקצר משמעותית את זמני הבדיקה והפיתוח
החברה הישראלית פיתחה מערכת הדמיה, המסייעת לחברות הפועלות בתחום הרכב האוטונומי לקצר משמעותית את זמני הבדיקה והפיתוח הנדרשים לצורך כך. "תעשיית כלי הרכב נעה במהירות לעבר כלי הרכב האוטונומיים", אמר רוטמן, "אלא שהם עדיין לא מאומנים מספיק לנסיעה בכביש. אנו באים ואומרים 'לא ניתן לעשות מספיק למידה על הכביש – צריך לעשות חלק מהאימון על בסיס הדמיה'. זאת, כדי לקצר את הפער התיאורטי של מאה שנים, עד שהמכוניות האוטונומיות תהיינה מוכנות".
"פיתחנו", הסביר, "מערכת הדמייה מקיפה בענן, היודעת לעשות את כל השלבים הנדרשים כדי לאמן כלי רכב אוטונומי, לרבות אימון, תיקוף, וניתוח. יש משמעות חשובה לנושא הגיאו-לוקלי. פיתחנו כלים היודעים לקחת מפה באיכות הפרדה גבוהה, HD, ובעזרתה 'לייצר' רחובות, כבישים ומסלולים. כדי לאמן רכב אוטונומי בתלת-מימד, במינוח הנקרא 'תאום דיגיטלי', יש לעשות המרה של העולם האמיתי כמה שיותר קרוב למציאות, עם סטייה של סנטימטרים בודדים לעומת המציאות. אנו יודעים לנתח מבנים, טופוגרפיה, גובה כביש זוויות ועיקולים, ולייצר אזורים בצורה פרוצדורלית – כלומר, לא לייצר כל פעם סביבה ייחודית, אלא לקחת מאפייני אזור אחד ו'להלביש' אותם על אזור שני. המערכת מאפשרת לדמות נסיעה בערים שונות מסביב לעולם, וכך היא מאפשרת לחברות הרכב להגדיל באופן משמעותי את אפשרויות הבדיקה בתנאי שטח, שהם שונים מתוואי השטח בו ממוקמת החברה".
"יש לנו", הסביר, "ארבע שכבות טכנולוגיות. האחת, שכבה סטטית, שמייצרת את התאום הדיגיטלי – בית, תמרור וכביש. השניה, שכבה דינמית – התנהגות נהגים, אגרסיביים או שומרי חוק, מידת הסבירות שהולך רגל יקפוץ לכביש שלא במעבר חציה. השכבה השלישית היא חושית, בה אנו מנסים להבין כיצד החיישנים והמצלמות של המכונית עובדים. זה נקרא 'מידול של רשתות לומדות'. זו הליבה העסקית שלנו, והיא מכונה מידע פוטו-ריאליסטי. השכבה הרביעית היא הענן. המערכת שלנו מייצרת עולם תלת-מימדי באופן מלא ובאיכות גבוהה והדבר מצריך משאבי מחשוב אדירים. אנו מטפלים ביותר מ-1 פטה בייט של נתונים".
"פלטפורמה ההדמיה שלנו", סיכם רוטמן, "משלבת בינה מלאכותית, למידה עמוקה וראיית מחשב. אנו מספקים סביבה וירטואלית, אך מציאותית ככל האפשר, המדמה באופן מדויק את הנהיגה בחיים האמיתיים. הצטרפנו לענן של AWS, הארכיטקטים שלהם עזרו לנו להגר אליו. הענן שלהם מאפשר לעבוד בלא הגבלה, עם שרתים רבים מאד. אנו מקבלים גישה לצוותים העסקיים שלהם, המחברים אותנו בעולם ללקוחות מתחום הרכב".







תגובות
(0)